Subsistemas eletrônicos
Subsistema de alimentação
Introdução
O subsistema de alimentação projetado para este produto visa fornecer uma solução eficiente e confiável para dispositivos eletrônicos que exigem uma tensão estável de 5V. O sistema é composto por uma bateria de chumbo-ácido, um regulador de tensão, um voltímetro e um sistema de carga lenta AC/DC.
Componentes
-
Bateria de Chumbo-Ácido Hazer 6-DZM-30 : 12V, 30Ah, garantindo autonomia para o dispositivo.
-
Regulador de Tensão: Converte tensão de 12V para 5V, com taxa de eficiência de 85%.
-
Voltímetro: Monitora tensão da bateria em tempo real.
- Sistema de Carga Lenta AC/DC: 220V/12V, 2A.
Funcionamento
- A bateria fornece tensão de 12V ao regulador.
- O regulador converte a tensão para 5V, alimentando o dispositivo.
- O voltímetro monitora a tensão da bateria.
- O sistema de carga lenta carrega a bateria quando conectado à rede elétrica.
- O sistema atuador é alimentado
Subsistema de comunicação
Comunicação da ESP32 com a Plataforma Alexa da Amazon
A comunicação da ESP32 com a plataforma Alexa da Amazon geralmente é feita por meio de serviços intermediários que permitem a integração entre dispositivos IoT e a Alexa. A ESP32 pode ser configurada para responder a comandos de voz processados pela Alexa ou enviar dados para Alexa por meio de um serviço intermediário (HTTP ou MQTT), que conecta a Skill da Alexa ao dispositivo IoT. Com essa arquitetura, é possível criar dispositivos inteligentes que respondem a comandos de voz para automação residencial e outras aplicações IoT.
Protocolos e Tecnologias Utilizadas
A comunicação pode ser implementada de diferentes formas, dependendo das necessidades do projeto. Algumas tecnologias comuns são:
1. HTTP/HTTPS (REST API)
- A ESP32 pode funcionar como um cliente HTTP que se comunica com um servidor REST.
- A Skill da Alexa é configurada para enviar comandos para o servidor, e a ESP32 periodicamente faz requisições ao servidor para buscar novas instruções.
2. MQTT
- A ESP32 atua como um cliente MQTT, assinando tópicos específicos para receber comandos.
- A Alexa Skill envia os comandos para o broker MQTT (por exemplo, AWS IoT Core, Mosquitto ou Adafruit IO), que repassa as mensagens para a ESP32.
3. Directives com AWS Lambda
- A Skill Alexa pode ser configurada para chamar uma função AWS Lambda, que atua como intermediário para enviar comandos à ESP32.
Implementação na ESP32
A ESP32 será programada para enviar dados para a Alexa. As seguintes bibliotecas podem ser utilizadas:
- WiFiClientSecure: Para conexões HTTPS.
- PubSubClient: Para comunicação MQTT.
- ArduinoJson: Para manipular os dados JSON recebidos.
- AsyncTCP: Para permitir um ambiente de rede multi-conexão para ESP32.
Integração com a API da Alexa
Para integrar o ESP32 com a API da Alexa, é necessário:
- Registrar um dispositivo: Criar uma conta de desenvolvedor na Amazon e registrar o dispositivo ESP32.
- Obter um token de acesso: Obter um token de acesso para autenticar o dispositivo.
- Implementar a API da Alexa: Utilizar a biblioteca Alexa Smart Home API para implementar os comandos de voz.
Passos para Integração
- Instalar a biblioteca Alexa Smart Home API: Adicionar a biblioteca ao projeto do ESP32.
- Configurar o dispositivo: Configurar o dispositivo ESP32 com as credenciais da Amazon.
- Implementar os comandos de voz: Implementar os comandos de voz para controlar o dispositivo.
- Testar a integração: Testar a integração com a API da Alexa.
Subsistema de controle
Configuração de Portas para ESP32 DevkitC V4
1. Motores com BTS7960
Os motores controlados pelos módulos BTS7960 são configurados nos seguintes GPIOs:
| Módulo | Pino BTS7960 | Pino ESP32 |
|---|---|---|
| Motor 1 | RPWM | GPIO 26 |
| Motor 1 | LPWM | GPIO 27 |
| Motor 1 | REN | GPIO 25 |
| Motor 1 | LEN | GPIO 33 |
| Motor 2 | RPWM | GPIO 14 |
| Motor 2 | LPWM | GPIO 12 |
| Motor 2 | REN | GPIO 13 |
| Motor 2 | LEN | GPIO 15 |
2. Sensores Ultrassônicos (HC-SR04)
Cada sensor ultrassônico requer 2 GPIOs: um para o Trigger e outro para o Echo.
| Sensor | Trigger (ESP32) | Echo (ESP32) |
|---|---|---|
| Sensor 1 | GPIO 4 | GPIO 5 |
| Sensor 2 | GPIO 18 | GPIO 19 |
| Sensor 3 | GPIO 21 | GPIO 22 |
3. Sensores Infravermelhos Sharp
Os sensores Sharp possuem saídas analógicas e são configurados nos ADCs da ESP32.
| Sensor | Saída Analógica (ESP32) |
|---|---|
| Sensor 1 | GPIO 34 (ADC1_CH6) |
| Sensor 2 | GPIO 35 (ADC1_CH7) |
4. Leitura de Tensão da Bateria
Um divisor de tensão é usado para reduzir a tensão da bateria para um nível seguro (0-3.3V) e conectado a um ADC.
| Componente | Pino ESP32 |
|---|---|
| Divisor de tensão | GPIO 32 (ADC1_CH4) |
5. Entrada de Joystick
Um joystick típico possui 2 saídas analógicas (eixos X e Y) e 1 digital (botão).
| Controle | Pino ESP32 |
|---|---|
| Eixo X | GPIO 36 (ADC1_CH0) |
| Eixo Y | GPIO 39 (ADC1_CH3) |
| Botão | GPIO 23 |
6. Botão de Emergência
Um botão de emergência é conectado a um GPIO configurado com resistor pull-up.
| Botão | Pino ESP32 |
|---|---|
| Botão de Emergência | GPIO 16 |
Resumo Completo das Ligações
| Componente | Pino ESP32 |
|---|---|
| Motores (via BTS7960) | 8 pinos (26, 27, 25, 33, 14, 12, 13, 15) |
| Ultrassônico 1 Trigger | GPIO 4 |
| Ultrassônico 1 Echo | GPIO 5 |
| Ultrassônico 2 Trigger | GPIO 18 |
| Ultrassônico 2 Echo | GPIO 19 |
| Ultrassônico 3 Trigger | GPIO 21 |
| Ultrassônico 3 Echo | GPIO 22 |
| Infravermelho Sharp 1 | GPIO 34 (ADC1_CH6) |
| Infravermelho Sharp 2 | GPIO 35 (ADC1_CH7) |
| Leitura de Tensão Bateria | GPIO 32 (ADC1_CH4) |
| Joystick Eixo X | GPIO 36 (ADC1_CH0) |
| Joystick Eixo Y | GPIO 39 (ADC1_CH3) |
| Joystick Botão | GPIO 23 |
| Botão de Emergência | GPIO 16 |
Referência das portas
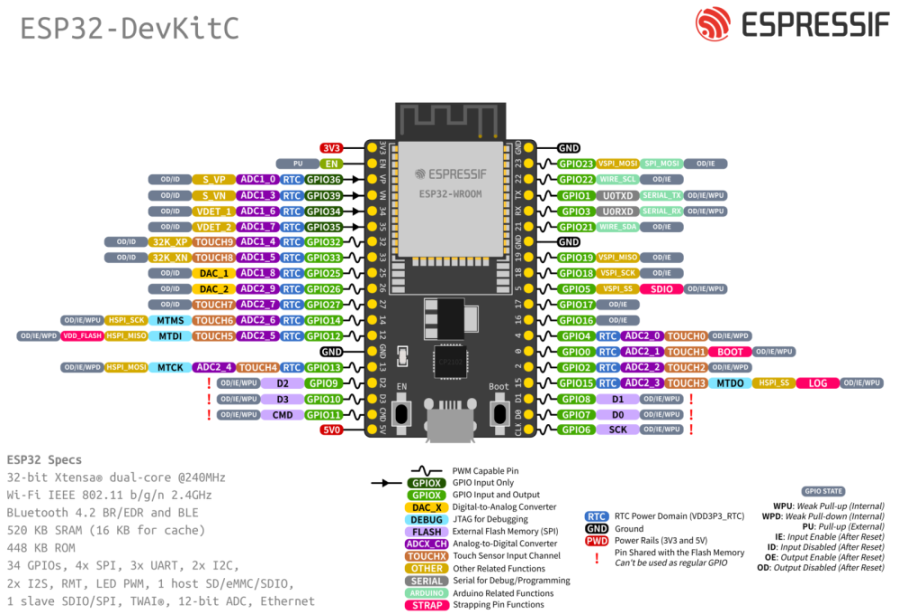
- Referência de pinout ESPRESSIF Placa DevkitC V4 : Link
Projeto PID
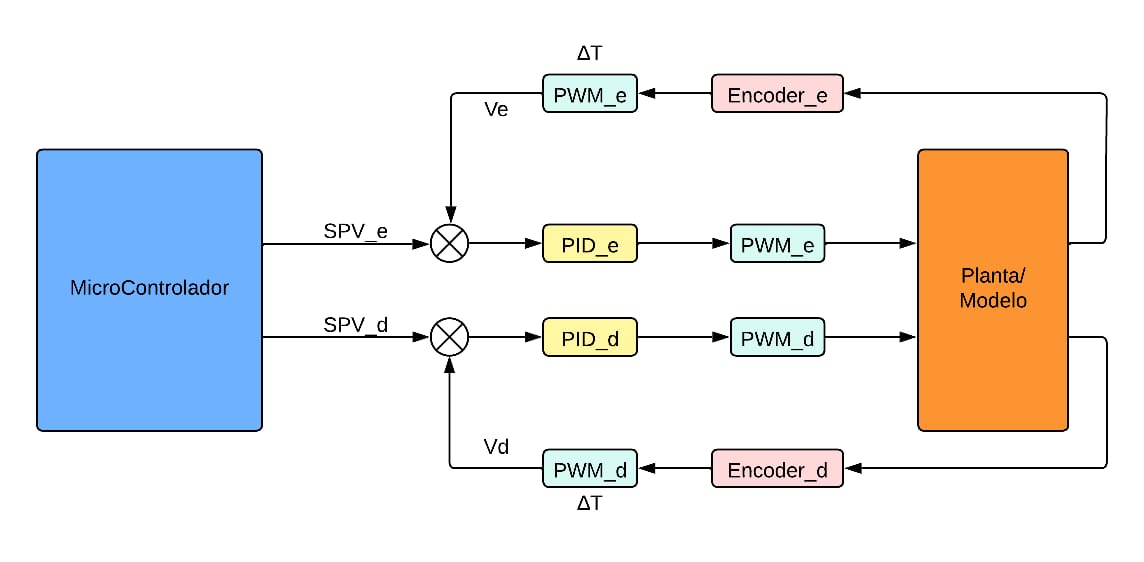
Nele, o micro enviaria os comandos de PWM - habilitação de sentido de giro (horário ou anti-horário) e intensidade de PWM - para a o módulo da ponte-H dos dois motores e, em um sistema com realimentação via encoder indutivo fixado nas rodas, haveria a correção tratada pelo PID do erro associado ao movimento efetivo nas rodas e do que está sendo enviado para elas (setpoint).
Modelamento do motor
O modelo para motor DC é bastante conhecido na literatura e é dado da forma abaixo:
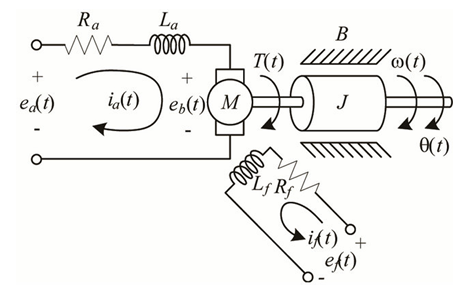
No desenho acima, na parte esquerda há a tensão da armadura seguida em série pela componente indutiva dos enrolamentos e de sua resistência intrísca do material seguido de uma conexão com o eixo do motor que faz a transmissão do movimento. No canto mais abaixo temos a composição de um estator com topologia em partes semelhante ao da armadura vista anteriormente.
As equações diferenciais das componentes elétricas e mecânicas são alcançadas aplicando Lei de Kirchoff das tensões nas duas malhas e aplicando o equilíbrio mecânico no eixo do motor (Lemus, 2018).


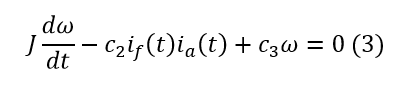
Fazendo uma conversão de variável nas expressões acima para que fique de acordo com o que é visto na teoria de controle fica:

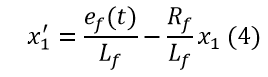

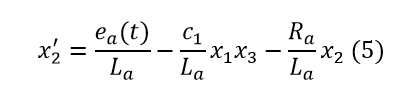

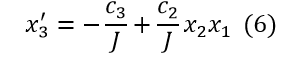
Após essa conversão e tratando a variável x1 como constante, temos que a primeira equação some e as outras podem ser reescritas alterando o valor das constantes por aquelas correspondentes a que se encontram na folha de dados do motor.

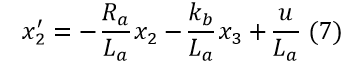
A partir da folha de dados do motor MR 210 PSVBUN 240 12 V, é possível chegar nos valores dos parâmetros que interessam para a modelagem do motores DCs que serão usados na cadeira robotizada.





Com os valores dos parâmetros calculados, é possível substituir em (7) e (8) e, com os resultados encontrados, convertê-las para a forma matricial abaixo:

Passando as equações (7) e (8) para o domínio de Laplace fica:


E com essas equações obtidas, é possível rearranjar as equações de forma a encontrar a função de transferência que descreva como o valor de entrada U(s) altera o giro do motor na saída X3(s):

Com a função de transferência alcançada, falta determinar os pólos que governam essa equação. As raízes no denominador são trivialmente encontrados por se tratar de uma equação de ordem 2 e seus valores são:

Comparando com a equação padrão de uma função de transferência de segunda ordem (Nise, 2012) como a observada abaixo:
E comparando com a encontrada no projeto do motor obtida, vem os valores de velocidade angular e damping ratio:

Como o valor de damping ratio é inferior a um, o sistema é classificadov como subamortecido. E tomando a transformada inversa de Laplace, chegamos ao valor da expressão de saída:

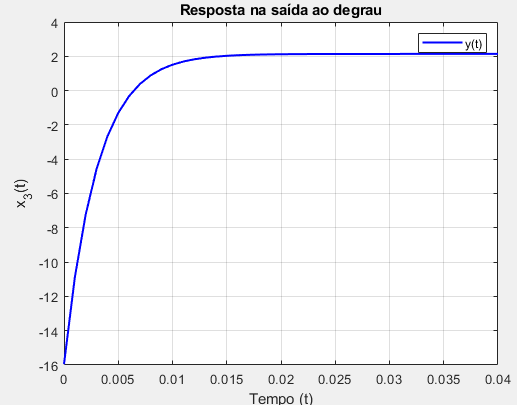
Com a resposta acima, observa-se que a saída não apresenta oscilações nem overshooting do valor de setpoint o que inviabiliza a criação de uma malha de realimentação que corrija o erro associado e possibilita que o sistema esteja suficientemente operante em malha aberta.
Subsistema de sensoreamento
Escolha dos Sensores
Para atender aos requisitos de detecção de proximidade e desníveis, foram selecionados os sensores HC-SR04 (ultrassônico) e GP2Y0A41SK0F (infravermelho), cada um com características específicas que, em conjunto, aumentam a robustez do sistema.
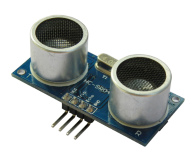
1. Sensor Ultrassônico HC-SR04
O sensor ultrassônico HC-SR04 é um módulo amplamente utilizado em aplicações de IoT e sistemas embarcados, destacando-se pela compatibilidade com o microprocessador selecionado e pelo seu custo acessível, o que o torna uma escolha prática e econômica para esta aplicação. Neste projeto, o sensor será implementado para medir a distância entre a cadeira de rodas motorizada e possíveis obstáculos, desempenhando uma função semelhante à dos sensores de estacionamento presentes em veículos automotivos.
O módulo HC-SR04 opera emitindo ondas ultrassônicas de alta frequência que, ao serem refletidas por um objeto, permitem calcular a distância entre o sensor e o obstáculo em seu campo de detecção. Com base na distância medida, é possível calibrar o sistema de controle para realizar ações preventivas e assim evitar acidentes, como emitir alertas sonoros e/ou interromper a alimentação dos motores que impulsionam as rodas.
A seguir, será conduzida uma análise das especificações técnicas do HC-SR04, com o objetivo de verificar sua adequação aos requisitos do sistema e garantir que o sensor atenda às demandas de desempenho e confiabilidade estabelecidas para o projeto.
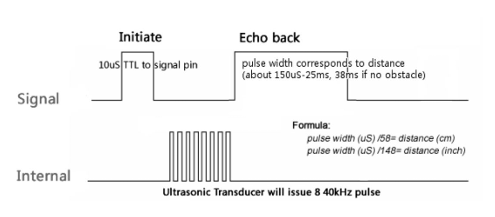
Princípio de Funcionamento
O HC-SR04 funciona emitindo um feixe de ondas ultrassônicas de 40 kHz a partir de seu transmissor. Essas ondas se propagam pelo ar até encontrar um obstáculo, no qual elas são refletidas de volta ao sensor. O receptor então capta o eco dessas ondas, e o tempo entre a emissão e o recebimento é utilizado para calcular a distância ao objeto.
A fórmula para calcular a distância é:

O fator de divisão por 2 é necessário para considerar o percurso de ida e volta da onda ultrassônica.
Especificações Técnicas
| Parâmetro | Valor |
|---|---|
| Alcance | 2 cm a 400 cm |
| Precisão | ±3 mm |
| Ângulo de Detecção | 15 graus |
| Frequência de Trabalho | 40 kHz |
| Tensão de Operação | 5 V DC |
| Consumo de Corrente | 15 mA |
| Dimensões | 45 x 20 x 15 mm |
A faixa de operação da leitura se adequa as especificações do projeto, pois precisamos detectar obstáculos entre 1 metro até 20 cm, permitindo evitar colisões e proporcionando uma navegação segura.
Conexão e Sinais
O HC-SR04 possui quatro pinos:
- Vcc: Alimentação (5V).
- Trig: Entrada de disparo.
- Echo: Saída de resposta.
- GND: Terra.
Para iniciar a medição, é necessário enviar um pulso HIGH de pelo menos 10 microsegundos no pino Trig. Isso faz com que o sensor emita uma sequência de 8 pulsos de 40 kHz e aguarde o retorno do eco. Quando o eco é recebido, o sensor gera um pulso HIGH na linha Echo com uma duração proporcional ao tempo necessário para que as ondas ultrassônicas retornem.
Esse tempo pode então ser utilizado para calcular a distância até o objeto. A saída é digital, porém opera na faixa entre 0 a 5V que é diferente da faixa de operação da ESP32 que opera entre 0 a 3.3V (É necessário um módulo regulador de tensão como por exemplo o AMS1117).
Aplicação no Projeto
Devido ao ângulo de detecção de 15 graus de cada sensor, vários sensores HC-SR04 serão posicionados na parte traseira eliminando possíveis pontos cegos que poderiam sugir ao se usar apenas um sensor. Isso permitirá detectar obstáculos que possam estar no trajeto do movimento até 4 metros de distância, um alcance que possibilita ao sistema responder rapidamente ao se aproximar de objetos ou paredes.
Vantagens e Considerações
- Resistência a Condições de Luz: O sensor ultrassônico não é afetado por variações de luz ambiente, sendo confiável tanto em ambientes iluminados quanto em áreas escuras.
- Precisão: A precisão da medida é na ordem de $10^{-3}$ metros, para o projeto é necessário realizar leituras da ordem de $10^{-2}$ metros.
- Interferência e Ruído: Apesar das vantagens, o sensor pode ser sensível a interferências de ruídos ultrassônicos externos. Em ambientes ruidosos, recomenda-se o uso de algoritmos de filtragem para evitar falsas detecções.
2. Sensor Infravermelho GP2Y0A41SK0F
O sensor infravermelho GP2Y0A41SK0F é amplamente utilizado em aplicações de detecção de proximidade e medição de distância, especialmente em projetos que exigem precisão em distâncias curtas. Seu formato compacto e sua saída analógica contínua facilitam a integração com microprocessadores, tornando-o uma escolha adequada para detectar degraus e desníveis à frente da cadeira de rodas. O GP2Y0A41SK0F contribuirá para aumentar a segurança, permitindo identificar mudanças bruscas no terreno e evitar acidentes.
O módulo GP2Y0A41SK0F emite um feixe infravermelho que reflete nos objetos próximos e retorna ao sensor. A distância é calculada com base no ângulo de reflexão da luz infravermelha captada pelo sensor, resultando em uma saída analógica proporcional à distância detectada.

A seguir, será apresentada uma análise das especificações técnicas do GP2Y0A41SK0F para verificar sua adequação aos requisitos do sistema e assegurar que o sensor atenda aos critérios de desempenho e confiabilidade definidos para o projeto.
Princípio de Funcionamento
O GP2Y0A41SK0F funciona emitindo um feixe de luz infravermelha em direção a um objeto. A luz refletida retorna ao sensor em um ângulo que varia conforme a distância ao objeto. Esse ângulo é convertido em um valor de tensão analógica, que é lido pelo microprocessador para calcular a distância entre o sensor e o objeto.
A relação entre a tensão de saída e a distância ao objeto não é linear; portanto, uma calibração é necessária para obter medidas precisas. A distância pode ser obtida a partir de uma curva de calibração fornecida pelo fabricante.
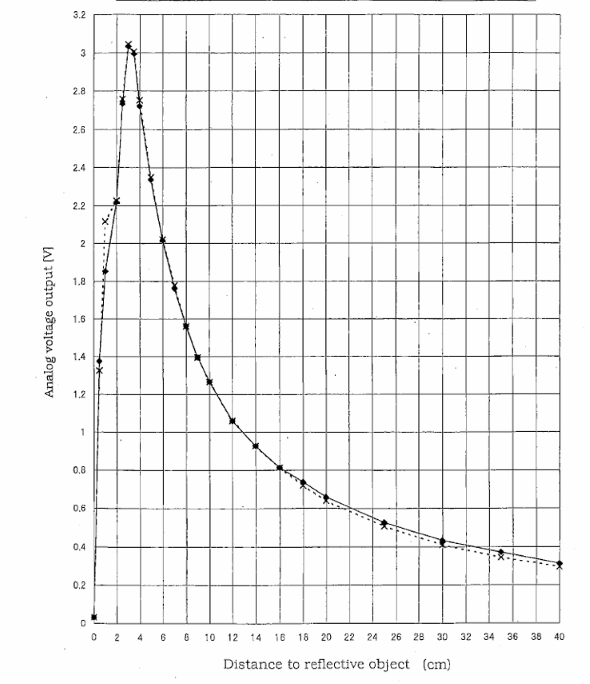
Especificações Técnicas
| Parâmetro | Valor |
|---|---|
| Alcance | 4 cm a 30 cm |
| Precisão | ±5% |
| Tensão de Saída | 0,4 V a 2,8 V |
| Tensão de Operação | 4,5 V a 5,5 V |
| Consumo de Corrente | 30 mA |
| Dimensões | 29,5 x 13 x 21,6 mm |
A faixa de operação do sensor é adequada para o propósito do projeto, pois permite identificar desníveis ou degraus a uma distância suficiente para que o sistema de controle possa realizar ações preventivas.
Conexão e Sinais
O GP2Y0A41SK0F possui três pinos:
- Vcc: Alimentação (4,5V a 5,5V).
- GND: Terra.
- Vout: Saída analógica de tensão.
A leitura da distância é feita através do pino Vout, que fornece uma tensão proporcional à distância medida. Essa saída analógica requer conversão para uma faixa de tensão compatível com o microcontrolador utilizado, como a ESP32, que opera com entradas de até 3,3V. Recomenda-se utilizar um divisor de tensão para adaptar a saída.
Aplicação no Projeto
O sensor GP2Y0A41SK0F será posicionado na frente da cadeira de rodas motorizada, visando a detecção de degraus e desníveis no percurso. Com um alcance de até 30 cm, o sensor permite a identificação de mudanças abruptas no nível do solo, acionando o sistema de controle para parar a cadeira ou emitir alertas ao usuário. Essa funcionalidade aumenta a segurança do sistema, prevenindo quedas e danos ao equipamento.
Vantagens e Considerações
- Precisão em Curta Distância: O sensor é altamente preciso em faixas de curta distância, ideal para detectar obstáculos próximos e desníveis.
- Resistência a Condições de Luz: Por utilizar luz infravermelha, o sensor é menos sensível às variações de luminosidade ambiente, sendo eficaz tanto em locais claros quanto escuros.
- Calibração Necessária: Devido à sua resposta não linear, é necessário calibrar o sensor para obter uma leitura de distância precisa. A calibração pode ser realizada com base na curva de resposta fornecida pelo fabricante.
- Interferência e Ruído: Em ambientes com fontes de luz infravermelha intensa, como luz solar direta, a precisão do sensor pode ser comprometida. Recomenda-se evitar exposição direta à luz solar ou realizar filtragem para reduzir interferências.
Subsistema Atuador
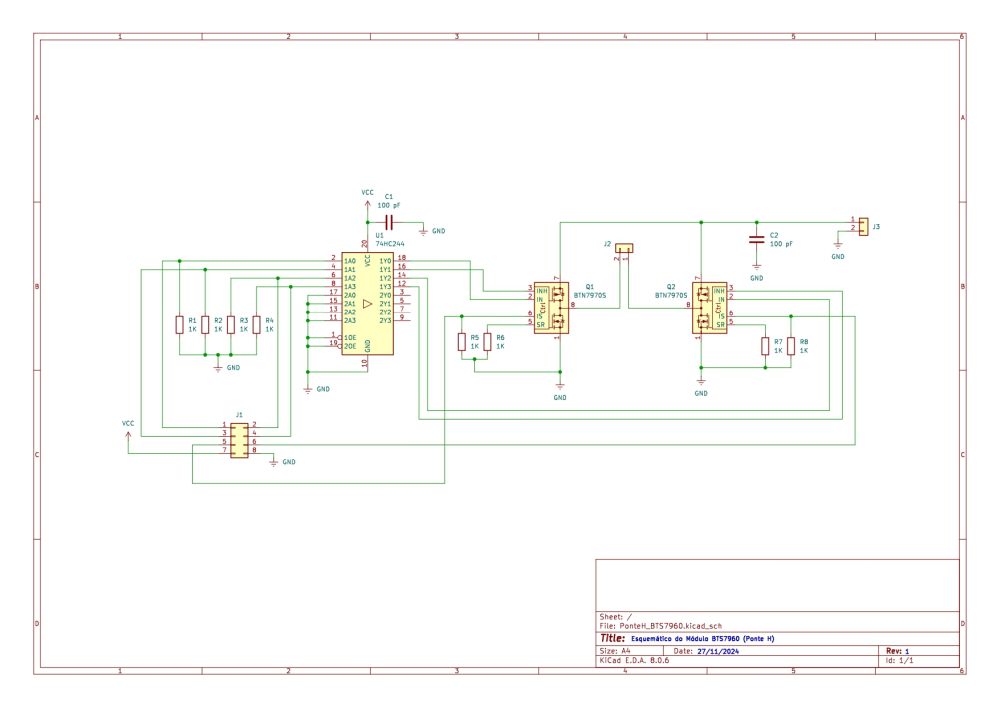
Módulo BTS7960 (Ponte H)
Esquema eletrônico da Ponte-H BTS7960
Objetivo
Conseguir controlar a intensidade de PWM e, consequentemente a velocidade linear desenvolvida pela cadeira, bem como a direção de giro do eixo dos motores.
Metodologia
Pesquisa de Mercado
Dentre os módulos disponíveis no mercado temos: L298N Dual H-Bridge, TB6612FNG Dual H-Bridge, DRV8871 Single H-Bridge, MX1508 Dual H-Bridge, DBH-12 Dual H-Bridge, BTS7960 H-Bridge, MD25HV H-Bridge.
| Nome | Corrente Contínua [A] | Corrente de pico [A] | Tensão [V] |
|---|---|---|---|
| L298N | 2,0 | 3,5 | 5,0-35,0 |
| TB6612FNG | 1,2 | 3,2 | 4,5-13,5 |
| DRV8871 | 2,0 | 3,6 | 6,5-45 |
| MX15108 | 1,5 | 2,5 | 2,0-10,0 |
| DBH-12 | 30,0 | 20,0 | 5,0-14,5 |
| BTS7960 | 30,0 | 43,0 | 6,0-27,0 |
| MD25HV | 25,0 | 60,0 | 7,0-58,0 |
Diante dessa disponibilidade de ponte-Hs foi possível fazer uma pesquisa de preço em alguns mercados para verificar quão custoso seria para o projeto a aquisição de uma delas.
| Nome | Preço unitário [R$)] | Quantidade | Preço Total [R$] |
|---|---|---|---|
| L298N | 22,52 | 1 | 22,52 |
| TB6612FNG | 33,90 | 1 | 33,90 |
| DRV8871 | 197,80 | 1 | 197,80 |
| MX15108 | ------ | - | ----- |
| DBH-12 | ------ | - | ----- |
| BTS7960 | 54,32 | 2 | 108,64 |
| MD25HV | ------ | - | ----- |
Diante dos requisitos de projeto da cadeira e em razão da disponibilidade e custo de ponte-H, é preferível a escolha do módulo BTS7960.
Lista de componentes
| Nome | Quantidade |
|---|---|
| BTN7960 | 2 |
| 74HC244 | 1 |
| Resistor 1K | 8 |
| Capacitor 100pF | 2 |
| Conector 1x2 | 2 |
| Conector 2x4 (ímpar/par) | 1 |
Conectores 2x1
Um dos conectores (J2) está destinado a receber as duas fases do motor, uma fase do motor vai na saída de um dos BTN7960 (pino 8) e a outra fase é conectada na saída (pino 8) do BTN7960 restante.
O segundo conector (J1) está destinado à alimentação, por isso um terminal está conectado em curto com os Vs (pino 7) dos BTN7960 e o outro terminal está conectado ao GND
Conectores 2x4 (ímpar/par)
| Pinagem | Função |
|---|---|
| Pino 1 | RPWM |
| Pino 2 | LPWM |
| Pino 3 | REN |
| Pino 4 | LEN |
| Pino 5 | RIS |
| Pino 6 | LIS |
| Pino 7 | VCC |
| Pino 8 | GND |
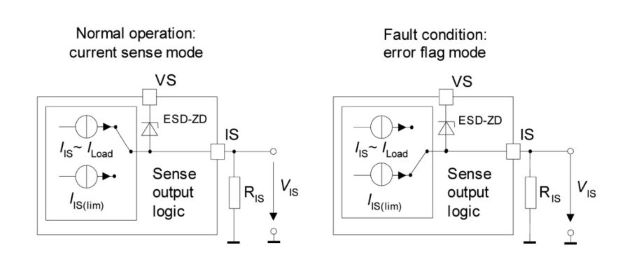
Os pinos 1 e 2 estão destinados ao controle de intensidade e direção (sentido horário e anti-horário); Os pinos 3 e 4 são os habilitadores para que ocorra movimento no sentido horário ou anti-horário, respectivamente; Os pinos 5 e 6 são usados como lógica de controle via verificação se está em estado normal de operação (corrente proporcional à carga) ou se uma flag de erro está setada (corrente que independe do valor da carga) e a queda de tensão VIS usada como parâmetro de teste de estado.
Os pinos 7 e 8 servem como alimentação, 12 V e GND respectivamente.
BTN7960
O pino 2 é uma entrada que define se a chave interna do MOSFET é ativada em nível alto ou baixo.
O pino 3 é um habilitador do modo sleep do componente, sendo ativado em nível baixo.
O pino 5 é o controle de slew rate do componente, sendo feita conectando um resistor desse terminal ao GND.
O pino 6 serve como lógica de controle por fonte de carga ou independente da ponte H (conforme seção anterior).
O pino 7 corresponde à alimentação da fonte externa DC da bateria que será usada.
O pino 8 corresponde à saída do componente, devendo ser fixada as duas do motor no conector J2 para que a ponte H completa seja montada.
74HC244
Pinos de entrada 2,4,6,8,11,13,15 e 17 (sendo que apenas os quatro primeiros pinos são usados, os outros estão aterrados) e 18, 16,14,12,3,5,7,9 suas respectivas saídas.
Pinos 1 e 19 são habilitadores para que haja comunicação das entradas com suas respectivas saídas e 10 e 20 são pinos de alimentação do componente.
Os pinos 2 e 4 correspondem ao tratamento dado para o sentido horário do movimento (PWM e habilitação) e suas respectivas saídas (pinos 18 e 16, respectivamente) são conectadas no Q1 para tratamento de chaveamento dos MOSFETs e do modo sleep do BTN7960. A mesma ideia é seguida para entradas de pino 6 e 8 com respectivas saídas 14 e 12 conectadas em Q2 mas para tratamento do sentido anti-horário do motor.
Resistores de 1K
Usados para diminuir a tensão que chega nos terminais do 74HC244 ou para configurar o slew rate dos BTN7960 ou para controle lógico no terminal IS.
Capacitores de 100p
Usados para que não haja uma queda brusca de na alimentação dos componentes quando for cessada o fornecimento de tensão DC e para que o nível de tensão na saída esteja constante, sem oscilações.
Testes
Para garantir a funcionalidade, segurança e confiabilidade dos sistemas eletrônicos integrados à cadeira de rodas motorizada, assegurando que todas as operações ocorram conforme os requisitos projetados.
Procedimentos de Teste
-
Microcontrolador ESP32 DevkitC V4 :
-
Testar a leitura e escrita das portas de I/O.
- Validar os timers e interrupções.
- Verificar o funcionamento da comunicação serial.
-
Verificar a tensão da bateria pela resposta do ADC0
-
Sensores:
-
Testar a resposta dos sensores indutivos em diferentes velocidades.
- Avaliar a precisão dos sensores de degrau e proximidade constante.
- Validar a comunicação entre os sensores e o microcontrolador.
-
Testar o comportamento dos motores em relação aos dados recebidos dos sensores.
-
Atuadores:
-
Medir o torque e a velocidade de rotação dos motores.
-
Verificar a resposta aos sinais de controle PWM.
-
Controle:
-
Configuração do Joystick para atender melhor os requisitos.
- Verificar a resposta aos sinais de controle do joystick e implementar com o controle PID.
- Avaliar a estabilidade e precisão do controle em resposta a diferentes entradas de referência.
Circuito de comunicação Esp32 e Sensores de Ré e Degrau
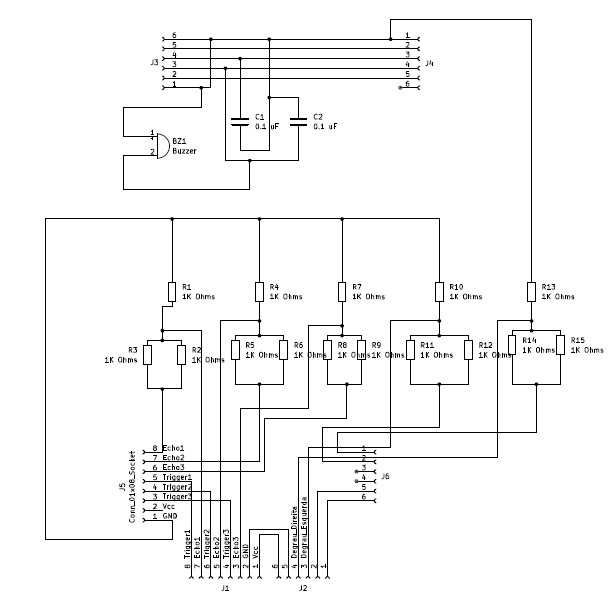
Com o intuito de estabelecer a comunicação entre o que estava sendo lido e enviado para o microcontrolador, foi necessário alimentar os sensores com uma tensão próxima de 3,3V. Isso foi alcançado por meio de um divisor de tensão, utilizando uma associação de resistores de 1KΩ (que era o valor de resistência disponível para a equipe).
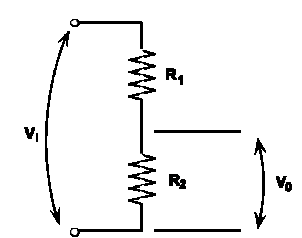
Com a proposta de divisor encontrada e com os valores de resistência dispostos foi possível chegar no valor de tensão adequada para alimentação dos sensores.

Essa abordagem foi adotada para os cinco sensores: três dedicados ao monitoramento da ré da cadeira e dois para a detecção de possíveis degraus, que serão utilizados no projeto da cadeira motorizada.
O sinal enviado pela ESP32 está na faixa de 5V (echo1, echo2 e echo3 em J5), enquanto o valor de 3,3V no divisor de tensão é retornado para os respectivos terminais de echo1, echo2 e echo3 em J1.
Os sinais de Trigger enviados pelo microcontrolador em J5 são direcionados diretamente para os Triggers dos sensores em J1.
Os terminais de GND e Vcc de J1 e J2 são conectados de forma que tanto os sensores de ré quanto os de degrau compartilhem a mesma alimentação. Novamente, o valor obtido no divisor de tensão é utilizado para alimentar um conjunto de sensores, desta vez, os de degrau.
Os terminais de J3 e J4 fazem a interface entre o joystick (J4) e o microcontrolador, considerando o uso de um buzzer como alerta sonoro de proximidade. A comunicação é realizada com um dos sensores de degrau (pino 1 de J4), e capacitores são utilizados para estabilizar o nível de tensão, evitando oscilações.
Tabela de versionamento
| Versão | Versão | Descrição | Responsável |
|---|---|---|---|
| 1.0 | 27/11/2024 | Criação do documento de subsistema | Rafael Frota |
| 1.1 | 30/11/2024 | Modificação na estrutura do documento | Thiago Henrique |
| 2.0 | 12/01/2025 | Adição da do sistema de controle PID | Gabriel Pantoja |
| 2.1 | 14/01/2025 | Correção das imagens | Squad Eletrônica |
| 2.2 | 16/01/2025 | Adição dos testes realizados | Squad Eletrônica |
| 3.1 | 13/02/2025 | Seção dedicada à placa de comunicação do microcontrolador e os sensores | Gabriel Pantoja |