Arquitetura de Eletrônica
Introdução
Este documento apresenta a arquitetura eletrônica preliminar para o projeto. O objetivo principal é detalhar a configuração e organização dos componentes eletrônicos necessários para a implementação de uma cadeira de rodas motorizada, adaptada a partir de uma cadeira comercial convencional.
A arquitetura eletrônica contempla o controle de motores elétricos, sensores para monitoramento do ambiente, interfaces de controle, e outros dispositivos necessários para garantir a funcionalidade e segurança do sistema. Este documento descreve as conexões, os mapeamentos de pinos do microcontrolador ESP32, e a disposição geral dos subsistemas eletrônicos, referências de componentes (Datasheet e manuais do fabricante) servindo como uma referência técnica para as próximas etapas do projeto.
Metodologia
A metodologia empregada na elaboração da arquitetura foi baseada em uma abordagem modular e iterativa, com as seguintes etapas:
- Análise de Requisitos: Identificação das necessidades funcionais e não funcionais do sistema.
- Projeto de Hardware:
- Escolha dos componentes adequados com base nos requisitos.
- Desenvolvimento do esquemático elétrico.
- Criação do diagrama de blocos para visualização da arquitetura geral.
- Configuração de GPIOs:
- Mapeamento e alocação dos pinos do ESP32 para cada componente.
- Otimização da distribuição dos sinais para reduzir interferências e melhorar o desempenho.
- Documentação:
- Registro detalhado de cada etapa do processo para facilitar a organização, manutenção e prototipagem do sistema.
Esta metodologia possibilitou a confecção deste relatório, fornecendo ao grupo uma visão geral e preliminar do sistema eletrônico, que atende aos objetivos propostos de forma eficiente e será implementado nas próximas etapas do projeto.
Objetivo
O objetivo principal deste projeto é desenvolver um sistema eletrônico integrado e funcional, com os seguintes propósitos:
- Controle de Motores: Gerenciar motores DC utilizando drivers BTS7960 para movimentação precisa.
- Sensoriamento de Obstáculos: Implementar sensores ultrassônicos (HC-SR04) e infravermelhos (Sharp) para detecção de objetos e monitoramento do ambiente.
- Monitoramento de Bateria: Ler a tensão da bateria para garantir segurança e evitar sobrecargas ou descargas profundas.
- Interface com Usuário: Incorporar um joystick para controle manual e um botão de emergência para interrupção imediata do sistema em caso de falhas.
- Integração e Modularidade: Facilitar a integração de novos componentes ou funcionalidades no futuro.
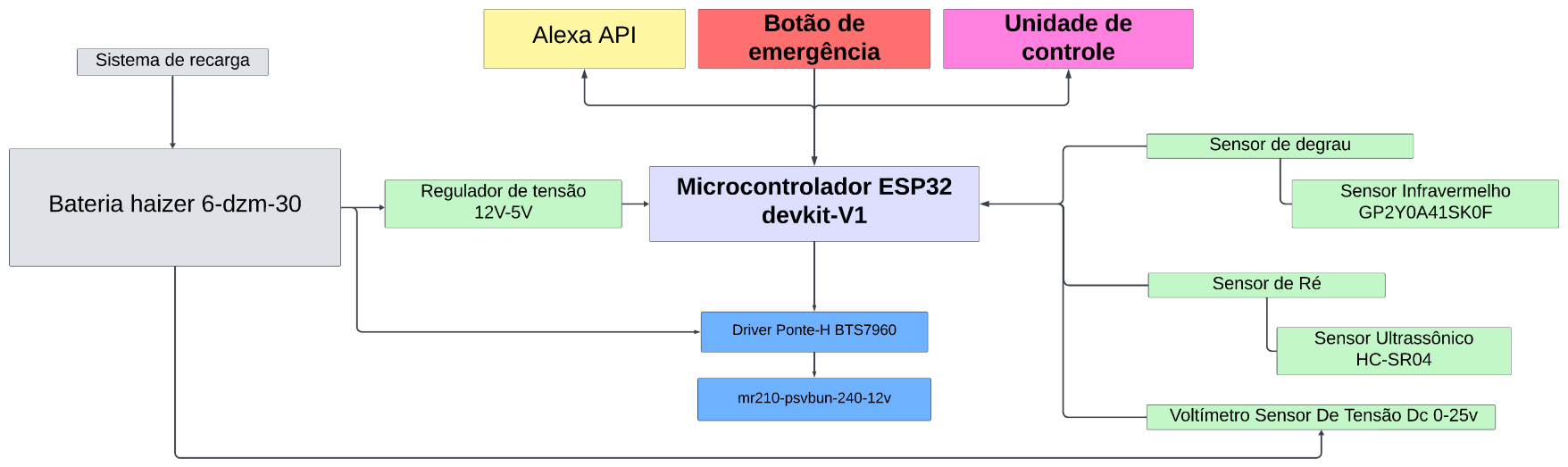
Diagrama de blocos eletrônico
A arquitetura eletrônica do projeto é implementada de modo a simplificar a solução do projeto e favorecer a redução de erros e a manufatura
Esquematico de eletrônica
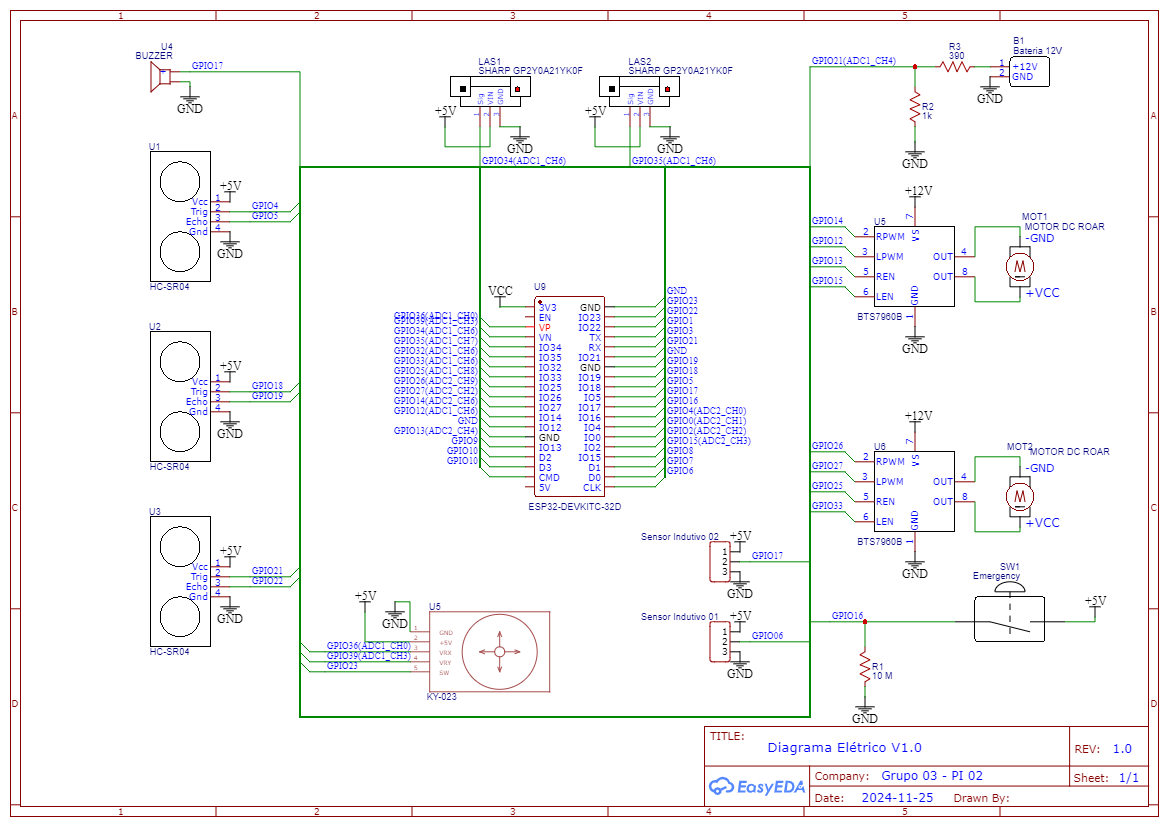
Esquemático Elétrico do Projeto: Link
Lista de componentes
| Item | Quantidade |
|---|---|
| ESP32 Wroom 32d CP2102 | 1 |
| Joystick 3 Eixos | 1 |
| Sensor Ultrassônico HC-SR04 | 3 |
| Sensor Infravermelho Sharp GP2Y0A21 | 2 |
| Módulo Regulador de Tensão Step Down LM2596 | 1 |
| Módulo Driver Ponte-H BTS7960 43A | 2 |
| Botão de Emergência Cogumelo 60mm | 1 |
| Módulo Voltímetro Sensor de Tensão DC 0-25V | 1 |
| Placa Fenolite Ilhada 10x10 cm Padrão PCB Perfurada | 2 |
| Sensor indutivo LJ18A3 | 2 |
Detalhamento dos Subsistemas
| Subsitema | Discrição |
|---|---|
| Subsistema de controle | Este subsistema é responsável por processar as informações recebidas dos sensores e os comandos do usuário, garantindo que decisões sejam tomadas em tempo real para controlar os atuadores e assegurar a funcionalidade e segurança do sistema. Ele interpreta dados do subsistema de sensoriamento e da leitura de comandos, transformando-os em sinais para o subsistema de atuadores. Além disso, gerencia o feedback fornecido ao usuário e a comunicação com a API da Alexa, permitindo integração com dispositivos inteligentes. |
| Subsistema de alimentação/energia | Responsável por fornecer energia para todos os componentes do sistema, garantindo operação confiável e prolongada. Ele distribui energia de forma eficiente para os subsistemas de controle, sensoriamento, atuadores e leitura de comandos, mantendo níveis de tensão estáveis. Esse subsistema também foi projetado para maximizar a autonomia da cadeira, atendendo às demandas de dispositivos móveis. |
| Subsistema de comunicação | Permite a troca de informações entre o sistema interno da cadeira e dispositivos externos, como smartphones ou assistentes virtuais. Ele utiliza conectividade Wi-Fi e Bluetooth para enviar dados importantes, como o status da bateria ou alertas, para a API da Alexa. Também recebe comandos remotos, permitindo ajustes rápidos e monitoramento em tempo real. |
| Subsistema Atuador | Gerencia os motores e outros dispositivos de ação, executando os comandos processados pelo subsistema de controle. Ele recebe sinais que definem a velocidade e a direção dos motores, utilizando modulação PWM e controle de sentido para permitir movimentação eficiente e segura da cadeira, seja para mudanças de direção ou paradas imediatas. |
Escolha do Microcontrolador
O ESP32 Wroom 32D foi selecionado como o microcontrolador principal do projeto por sua capacidade de atender de forma eficiente aos requisitos técnicos e funcionais. Equipado com um processador dual-core de 32 bits que opera a até 240 MHz, ele proporciona o desempenho necessário para processar dados de diversos sensores em tempo real, garantindo a segurança e funcionalidade do sistema.
Sua conectividade Wi-Fi e Bluetooth integrada elimina a necessidade de módulos adicionais, simplificando o design eletrônico e permitindo monitoramento remoto de forma prática e eficiente. Com 34 GPIOs configuráveis, suporte a protocolos como I2C, UART e SPI, e canais ADC de 12 bits, o ESP32 facilita a integração de módulos de controle, atuadores e sensores, além de oferecer flexibilidade para futuras expansões do sistema.
Além disso, seus modos de baixo consumo energético otimizam a autonomia da bateria, uma característica essencial para dispositivos móveis como a cadeira de rodas motorizada. A combinação de alto desempenho, conectividade, flexibilidade e eficiência energética torna o ESP32 a escolha ideal para atender às demandas deste projeto.
Tabela de versionamento
| Versão | Versão | Descrição | Responsável |
|---|---|---|---|
| 1.0 | 27/11/2024 | Criação do documento de arquitetura | Rafael Frota |
| 1.1 | 30/11/2024 | Modificação na estrutura do documento | Squad Eletrônica |
| 2.0 | 18/01/2025 | Atualização das imagens | Squad Eletrônica |